为激发我院师生的科研热情、促进校院间学术交流,应自动化学院邀请,2025年4月12日,国家级青年人才、华中科技大学船海学院副院长、博士生导师向先波教授作了题为“水下机器人动态对接智能控制研究进展报告会”的学术报告。报告会由自动化学院机器人工程系王海滨博士主持,相关学院教师以及硕博研究生等50余人在线参会。
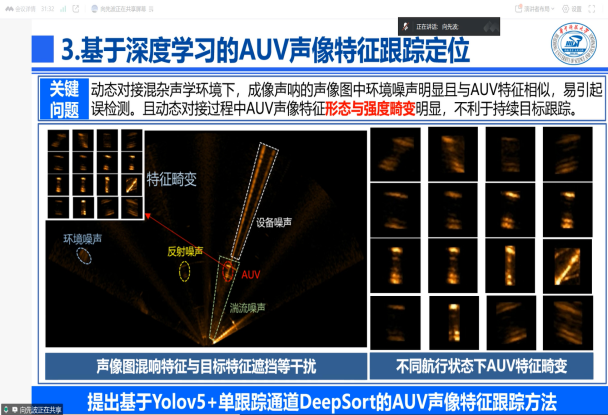
报告会上,向先波教授以水下机器人回收补给任务的需求为切入点,介绍了固定基座静态对接以及动态对接模式下的全流程控制设计思路(包括远距离USBL定位、中距离视觉导引以及近距离高精度控制三个阶段),同时针对不确定流场干扰提出了基于改进滤波算法以及视觉单通道跟踪控制设计,不仅提高了对接的稳定性而且提高了对接的成功率。此外,报告中向先波教授详细介绍了面向典型对接应用场景的湖试进展情况,包括设计对接实验的设计、基于对抗深度强化学习的数据训练及运动控制、仿真及样机实验。
本次会议学术氛围浓厚,多位师生与向先波教授进行了交流和讨论。最后,王海滨博士总结发言,对向先波教授的精彩报告表示衷心的感谢,建议师生借助学院提供的学术交流平台,及时掌握学术前沿动态,加强学术交流合作,为学院学科专业发展助力,并且邀请向先波教授来哈尔滨理工大学进行线下的交流与指导。


向先波教授作学术报告
报告专家简介:向先波,华中科技大学教授、博导,船海学院副院长。中国海洋工程咨询协会监事、湖北省人工智能学会副理事长。长期从事海洋机器人及智能装备领域的基础理论及工程应用研究,主持国家自然科学基金重点项目、国家重点研发计划国合重点专项、湖北省自然科学基金创新群体等30余项,发表论文200余篇,授权国内外发明专利40余项。英国皇家造船工程师学会会刊副主编,《Applied Ocean Research》《华中科技大学学报》《中国舰船研究》等国内外重要期刊编委。2019年入选国家青年人才计划,2020年起连续入选爱思唯尔中国高被引学者。以第一完成人获日内瓦国际发明展特别金奖、中国交通运输协会技术发明一等奖等。
 EN
EN 搜索
搜索